Industrial Robotics Project
This project was part of the "Industrial Robotics" course at Faculty of Engineering, Ain Shams University, Egypt.
The main target of the project is to model a 6-DOF manipulator, then plan a trajectory for the modelled robot to a
specific goal. Finally, control each joint using PID controller to achieve the generated trajectory
on Gazebo.
You can check the code of the project on Github.
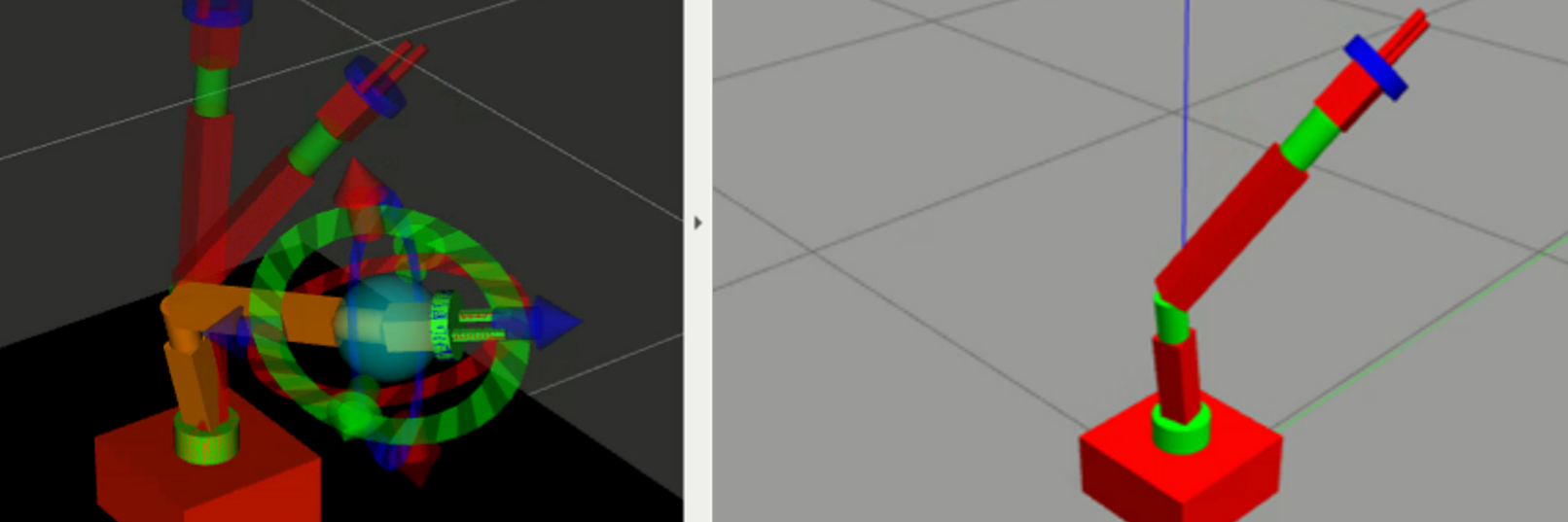
- Model a 6-DOF manipulator by developing a URDF file for modelling the robot links, by using our own dimensions and test it on Rviz
- Use Moveit toolbox to plan a trajectory to a given cartesian goal and visualize the motion of the robot on Rviz.
- Take the joint angles produced by Moveit toolbox as a setpoint to control each joint in Gazebo simulator using PID controller and reach the desired goal.
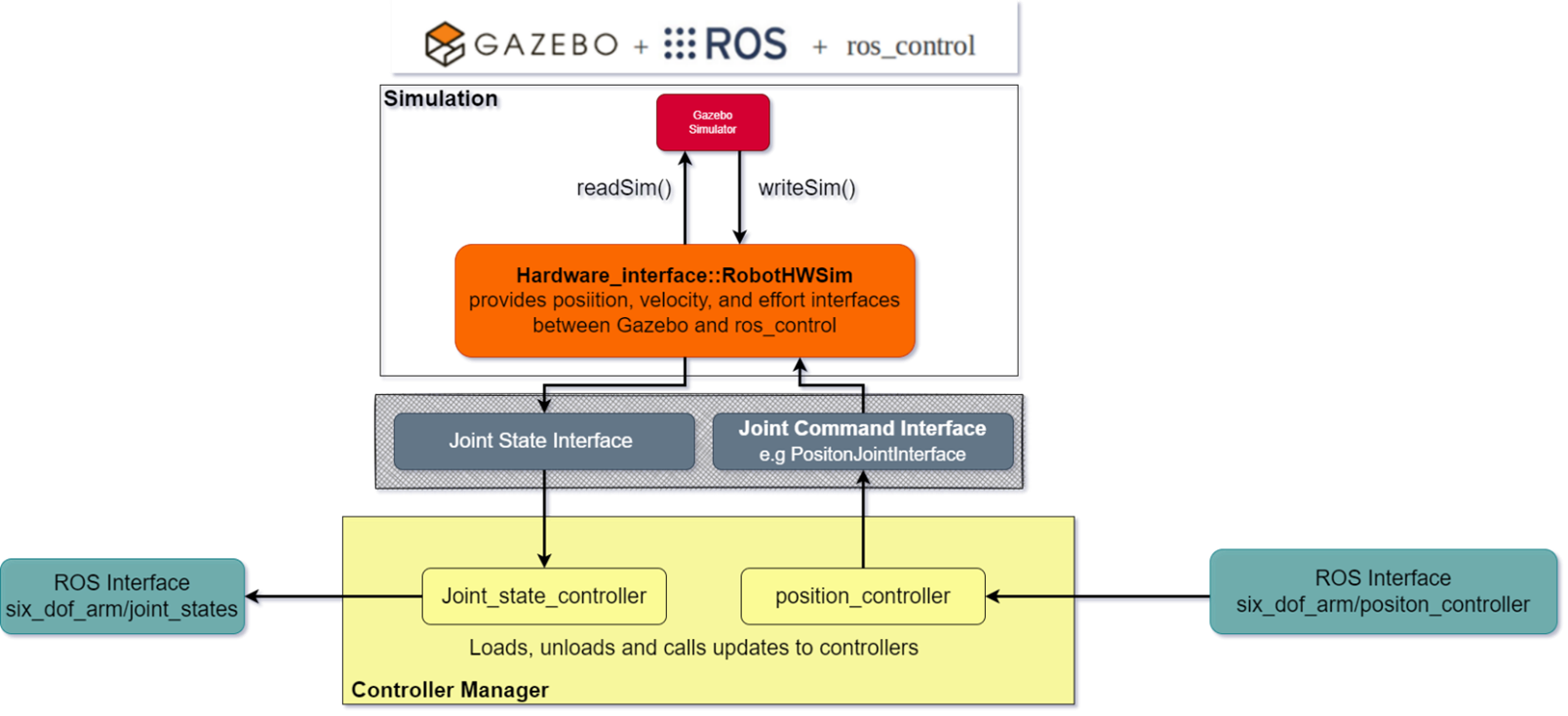
ROS Control in Sumation Architecture:
System Block Diagram:
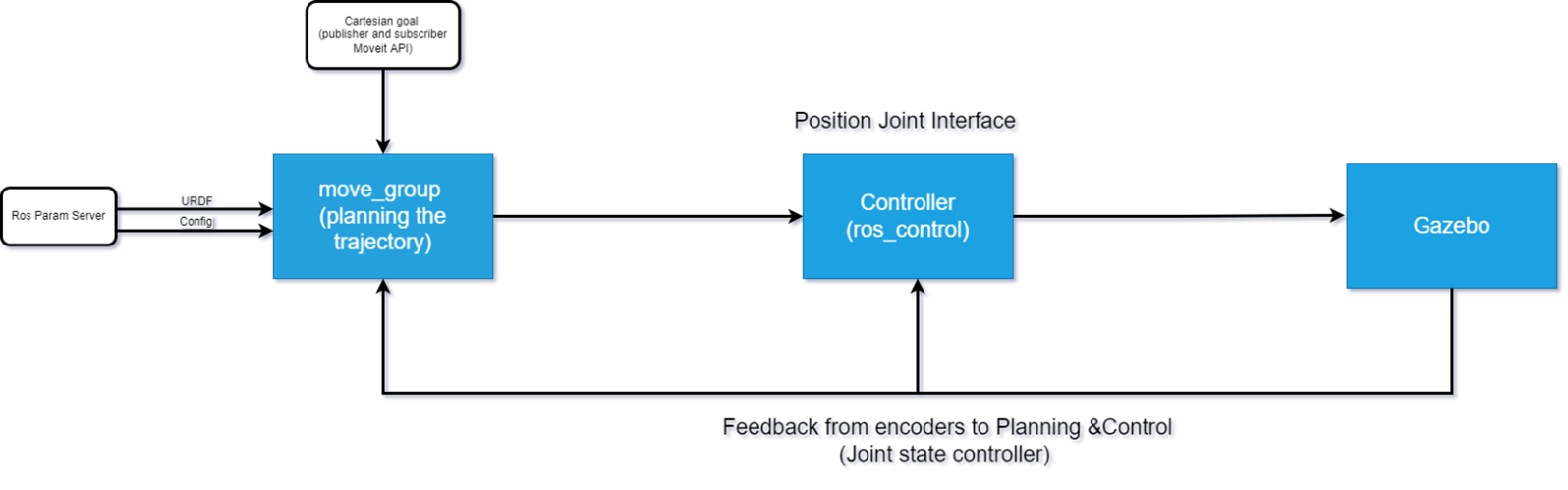
System Block Diagram:
This video narrated by me shows the whole project:
Implementation details can be discussed upon request.